▌Parte I: El actuador como sistema nervioso del robot
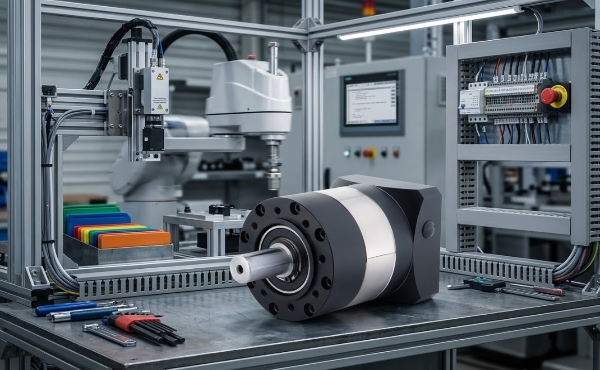
Cada movimiento robótico, desde la manipulación quirúrgica a nivel de micras hasta la clasificación logística de alta velocidad, se origina en el actuador de la articulación. Sin embargo, la selección de actuadores a menudo se trata como una tarea de adquisición más que como un problema de ingeniería a nivel de sistema.
En realidad, un actuador de motor de articulación de robot debe gestionar simultáneamente la ondulación del par, el comportamiento térmico, la latencia del codificador, los armónicos del engranaje y la estabilidad del circuito cerrado. Cualquier debilidad en un parámetro se propaga a través de toda la cadena cinemática, degradando la precisión y la repetibilidad.
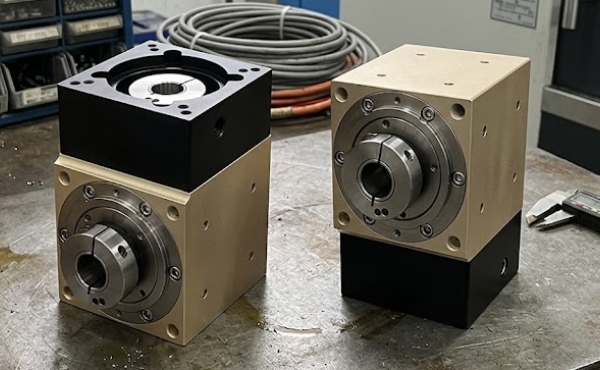
El actuador de motor de articulación robótica ND-A5216-10 desarrollado por iHF Group aborda esto integrando motor, caja de cambios planetaria y retroalimentación de codificador dual en un sistema unificado de diseño conjunto en lugar de componentes discretos. Esto elimina las pérdidas de interfaz y mejora la coherencia dinámica en todos los regímenes operativos.

▌Parte II: Desglose de ingeniería del ND-A5216-10
2.1 Diseño electromagnético: supresión de par dentado
Un desafío clave en el movimiento de precisión es el par dentado, causado por la interacción rotor-estator. Produce ondas de velocidad a baja velocidad, búsqueda posicional y ruido acústico.
El ND-A5216-10 mitiga esto mediante una geometría de ranura optimizada y un diseño de rotor magnético sesgado. La optimización de elementos finitos garantiza una salida de par uniforme incluso por debajo de 100 RPM, un rango crítico para ensamblajes de precisión, control de fuerza y tareas de inserción delicadas.
2.2 Reducción del engranaje planetario: <3 reacción de minuto de arco
El actuador integra una caja de cambios planetaria helicoidal de alta precisión con un juego inferior a 3 minutos de arco (0,05°). En un brazo de 1 metro, esto corresponde a una desviación de la punta <0,87 mm solo del juego del engranaje.
Los engranajes helicoidales proporcionan un compromiso progresivo y ofrecen:
● Mayor densidad de par que los engranajes rectos
● Transmisión de vibraciones reducida
● Menores emisiones acústicas para entornos seguros para las personas.
En comparación con los sistemas rectos, la reducción planetaria helicoidal mejora la suavidad y la distribución de la carga, mejorando la estabilidad estructural y la respuesta dinámica.
2.3 Arquitectura de codificador dual
A diferencia de los sistemas de codificador único que infieren el movimiento de salida a través de relaciones de transmisión, el ND-A5216-10 utiliza codificadores duales:
● Codificador del lado del motor para conmutación y control de velocidad
● Codificador del lado de salida para la posición real del eje
Esto elimina los errores acumulativos debidos al juego, la elasticidad torsional y la expansión térmica. También permite realizar diagnósticos en tiempo real comparando la desviación de la posición del motor y de salida, lo que permite la detección temprana del desgaste mecánico.
2.4 Control unificado de circuito cerrado
El actuador admite regulación simultánea de par, velocidad y posición a través de bucles de control en cascada:
● Bucle de torsión: ancho de banda de 1 a 5 kHz
● Bucle de velocidad: 200–500 Hz
● Bucle de posición: 50–200 Hz
La dinámica inversa de avance compensa la inercia y los efectos no lineales, lo que reduce el error de seguimiento durante la aceleración rápida. Esto permite un cambio perfecto entre movimiento de alta velocidad y control de fuerza compatible sin transiciones de modo.

▌Parte III: Rendimiento dinámico y térmico
3.1 Inversión rápida de dirección
El tiempo de ciclo en robótica suele estar dominado por la desaceleración y la inversión en lugar de la velocidad máxima. El ND-A5216-10 reduce el retraso de reversión mediante:
● Baja inercia del rotor
● Ancho de banda de bucle de alta corriente
● Cumplimiento mecánico controlado en el tren de engranajes
Esto minimiza la oscilación y mejora el rendimiento en los sistemas de inspección, soldadura y recogida y colocación.
3.2 Gestión térmica
La estabilidad térmica es fundamental en el funcionamiento en servicio continuo. El aumento de temperatura aumenta la resistencia, reduce la constante de torsión y acelera el envejecimiento del aislamiento.
El actuador soluciona esto a través de:
● Diseño de estator con factor de llenado de cobre alto
● Materiales de encapsulado térmicamente conductores
● Carcasa de aluminio acanalada para mejorar la convección
Estas características reducen la reducción de potencia y mantienen una salida de par estable en funcionamiento 24 horas al día, 7 días a la semana.
▌Parte IV: Dominios de aplicación
4.1 Fabricación de precisión
En la producción de microensamblajes y electrónica, los requisitos de precisión alcanzan ±0,02–0,05 mm. El ND-A5216-10 permite esto mediante un juego reducido, retroalimentación dual y una salida de torque suave. Es particularmente eficaz en las articulaciones de las muñecas de brazos robóticos multieje para tareas de orientación precisa.
4.2 Robótica colaborativa
Los cobots deben cumplir con los límites de fuerza ISO/TS 15066 manteniendo la productividad. La baja fricción, la rápida respuesta de torsión y el diseño de bajo ruido del actuador permiten una interacción humana segura. El engranaje helicoidal reduce la salida acústica, mejorando la usabilidad en el lugar de trabajo.
4.3 Automatización Logística
En los AGV y los sistemas de clasificación, la adaptabilidad es fundamental. El control del modo de torsión permite el manejo de diversas cargas útiles, desde artículos frágiles hasta paquetes pesados, sin cambios de hardware. La aceleración y desaceleración rápidas mejoran directamente la eficiencia del rendimiento.
4.4 Sistemas de inspección y laboratorio
La metrología y la inspección de semiconductores requieren entornos con vibraciones ultrabajas. El equilibrio del rotor del actuador y el suave engranaje del engranaje minimizan la transmisión de vibraciones, lo que garantiza la estabilidad de la medición en equipos sensibles adyacentes.
▌Parte V: Filosofía de ingeniería del Grupo iHF
En iHF Group, el desarrollo de actuadores sigue una filosofía de codiseño a nivel de sistema:
● Optimización de la densidad de par en los dominios electromagnético, térmico y mecánico.
● Simulación multifísica para eliminar el engranaje y la saturación tempranamente.
● Control de vibración a nivel de sistema que integra el actuador y la estructura
● Diseño mecánico consciente del control para una respuesta dinámica mejorada
● Validación de durabilidad basada en IEC 60068 para confiabilidad industrial
El ND-A5216-10 no es un componente independiente, sino parte de un sistema de movimiento cooptimizado diseñado para entornos de fabricación inteligentes.
▌Parte VI: Contexto del mercado
El mercado de actuadores robóticos se está expandiendo rápidamente debido a:
● Automatización de la Industria 4.0 y sistemas de producción flexibles
● Crecimiento de la robótica colaborativa en entornos humanos compartidos.
● Miniaturización de maquinaria industrial.
● Demanda de mayor densidad de par en espacios compactos
En este contexto, los actuadores integrados como el ND-A5216-10 reducen la complejidad del sistema al combinar motor, caja de cambios y detección en una arquitectura, lo que acelera los ciclos de desarrollo de OEM y mejora la confiabilidad.
❓ Preguntas frecuentes
P1: ¿En qué se diferencia el ND-A5216-10 de los sistemas de motor + caja de cambios?
Integra motor, caja de cambios planetaria y codificadores duales en un sistema codiseñado, lo que elimina errores de alineación y mejora la precisión del circuito cerrado.
P2: ¿Cuál es su rendimiento de reacción?
Por debajo de 3 minutos de arco, lo que corresponde a un error de posicionamiento submilimétrico en brazos robóticos largos.
P3: ¿Por qué codificadores duales?
Eliminan los errores de inferencia midiendo directamente la posición de salida, mejorando la precisión de la trayectoria y permitiendo el mantenimiento predictivo.
P4: ¿Se admite el control de par?
Sí. El actuador admite control de posición, velocidad y par en tiempo real con respuesta de gran ancho de banda adecuada para aplicaciones sensibles a la fuerza.
P5: ¿Es adecuado para cobots?
Sí. El bajo nivel de ruido, el control de par compatible y la respuesta rápida lo hacen adecuado para entornos de colaboración entre humanos y robots.
P6: ¿Qué ventajas ofrece en los sistemas logísticos?
El control de par adaptativo permite el manejo de cargas útiles mixtas con diferentes masas y fragilidades sin cambios de hardware.
P7: ¿Qué apoyo brinda iHF Group?
Modelos CAD, datos de velocidad de par, análisis térmico y soporte de ingeniería a nivel de aplicación para la integración OEM.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Solicitar cotización
Solicitar cotización