En los sistemas robóticos de ejes múltiples, la precisión posicional, la repetibilidad y la capacidad de respuesta dinámica del efector final no están determinadas únicamente por la sofisticación del algoritmo de control. Están fundamentalmente limitados por el ancho de banda mecánico, las características de juego y la densidad de torsión de los actuadores de articulación individuales que componen la cadena cinemática. Un robot articulado de seis ejes con precisión de efector final submilimétrica requiere que cada articulación ofrezca una resolución de posicionamiento angular en el rango de segundos de arco, con rigidez torsional que evita la deflexión bajo momentos inducidos por la carga útil.
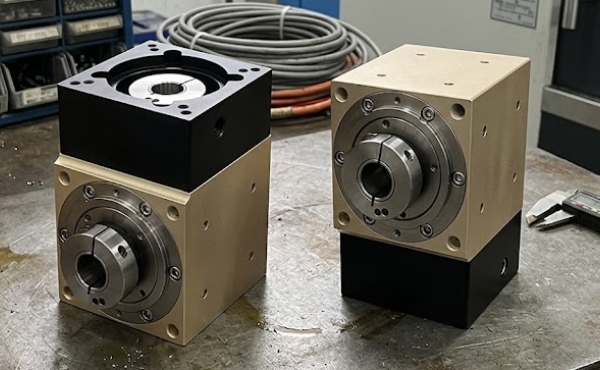
El actuador de motor de articulación robótica: ND-A5215-10 de iHF Group representa una solución diseñada específicamente para esta capa de restricción. En lugar de ensamblar servomotores, cajas de cambios y codificadores genéricos en una configuración conjunta, iHF Group ha integrado estos subsistemas en un módulo actuador unificado optimizado específicamente para la dinámica mecánica, térmica y de control de la articulación robótica.

Arquitectura Electromecánica Integrada
Topología del motor de torsión sin marco
Los diseños de juntas de robots tradicionales emplean servomotores alojados acoplados a cajas de engranajes de accionamiento planetario o armónico a través de acoplamientos mecánicos. Este conjunto introduce errores de alineación, juego de acoplamiento y mayor longitud axial que comprometen la compacidad de la junta y la respuesta dinámica.
El ND-A5215-10 utiliza una arquitectura de motor de torsión sin marco en la que el rotor está directamente integrado en el eje de salida de la articulación y el estator en la carcasa de la articulación. Esta eliminación de la carcasa del motor y las interfaces de acoplamiento separadas reduce la longitud de la junta entre un 30% y un 40% en comparación con los ensamblajes convencionales, lo que permite mayores relaciones carga útil-peso y envolventes de robot más compactas. El motor de torsión de accionamiento directo ofrece un par continuo de 15 Nm con una capacidad máxima de 45 Nm, lo que proporciona la alta densidad de par a bajas velocidades que exige la articulación robótica sin las pérdidas de eficiencia y el juego de la reducción de engranajes de múltiples etapas.
Reducción de precisión de accionamiento armónico
Si bien los motores de torsión sin marco brindan una excelente densidad de torsión, las velocidades de salida requeridas para los perfiles típicos de movimiento de las articulaciones del robot (generalmente 30-120 RPM) requieren una reducción de velocidad. El ND-A5215-10 integra un reductor de accionamiento armónico con una relación de transmisión de 100:1, logrando una reducción de una sola etapa con características de juego cero que los sistemas planetarios o cicloidales no pueden replicar.
La tecnología de accionamiento armónico emplea una línea flexible deformada por un generador de ondas contra una línea circular, creando un acoplamiento simultáneo de múltiples dientes que distribuye la carga entre el 30 % de los dientes disponibles. Esta geometría de compromiso produce una repetibilidad posicional de ±10 segundos de arco y una rigidez torsional superior a 20 000 Nm/rad, especificaciones que se traducen directamente en precisión del efector final en configuraciones de múltiples ejes.
La fabricación de actuadores de motores de juntas robóticas de precisión de iHF Group valida los componentes de accionamiento armónicos mediante la medición del perfil de la forma de los dientes flexspline, la geometría del orificio estriado circular y el descentramiento del rodamiento del generador de ondas. El ensamblaje incorpora protocolos de precarga que optimizan los patrones de contacto de malla sin inducir una tensión excesiva en la línea flexible que comprometería la vida útil de la fatiga.
Arquitectura de retroalimentación de codificador absoluto dual
El control de posición en articulaciones robóticas requiere retroalimentación en dos puntos distintos: la posición del rotor del motor para conmutación y control de corriente vectorial, y la posición del eje de salida para el cierre del servocircuito a nivel de articulación. El ND-A5215-10 integra codificadores absolutos duales: un codificador multivuelta de 23 bits en el rotor del motor y un codificador de una sola vuelta de 19 bits en la salida del variador armónico.
Esta configuración de codificador dual permite estrategias de control avanzadas: compensación de ondulación del par mediante alimentación anticipada de la posición del motor, compensación de holgura mediante retroalimentación de la posición de salida y detección de colisiones mediante estimación instantánea del par a partir de la corriente del motor y la derivada de posición. La codificación absoluta elimina las secuencias de referencia en el momento del encendido, lo que reduce el tiempo de inicio del robot y permite una recuperación segura de la operación después de paradas de emergencia.

Gestión térmica y rendimiento de servicio continuo
Ingeniería de ruta de calor
Los motores de torsión sin marco generan pérdidas resistivas (I²R) en los devanados del estator que deben disiparse para evitar la degradación del aislamiento y la desmagnetización de los imanes del rotor de tierras raras. En configuraciones de juntas compactas donde el motor está integrado dentro de la carcasa de la junta, la refrigeración por aire convencional no es práctica.
El ND-A5215-10 emplea un circuito de refrigeración líquida integrado en la carcasa de la junta, con conductos de refrigerante mecanizados en la estructura de aleación de aluminio que contactan directamente con la pila de laminaciones del estator. Este diseño logra una resistencia térmica desde el devanado hasta el refrigerante de 0,15 K/W, lo que permite un funcionamiento continuo con par nominal con temperaturas de entrada del refrigerante de hasta 35 °C. Para aplicaciones sin disponibilidad de refrigerante en las instalaciones, iHF Group ofrece una variante refrigerada por aire térmicamente optimizada con geometría de aletas extendida y convección forzada interna.
Modelado y protección térmica
iHF Group proporciona modelos térmicos calibrados para perfiles de movimiento de robots específicos, lo que permite a los clientes predecir el aumento de temperatura del devanado en ciclos de trabajo anticipados. Los sensores de temperatura integrados (RTD PT1000 integrados en las espiras finales del devanado) brindan monitoreo térmico en tiempo real con protección contra sobretemperatura que reduce el comando actual antes de que se alcancen los umbrales de daño.
Integración mecánica y estandarización de interfaces
Arquitectura de eje hueco
El ND-A5215-10 cuenta con un orificio pasante central de 15 mm de diámetro, que permite el paso de cables de alimentación, cableado de señal, líneas neumáticas o fibras ópticas a través del centro de unión en lugar de enrutarlos externamente. Este diseño de eje hueco elimina la complejidad de la gestión de cables en robots multieje, reduce los riesgos de enganches durante el movimiento y mantiene una geometría exterior limpia para aplicaciones de robots colaborativos donde se anticipa la proximidad humana.
Compatibilidad de la interfaz de montaje
iHF Group estandariza las interfaces mecánicas ND-A5215-10 con patrones de bridas ISO 9409-1, lo que permite la integración directa con brazos robóticos disponibles comercialmente sin necesidad de fabricar adaptadores personalizados. El eje de salida incorpora una interfaz enchavetada o estriada con una capacidad de transmisión de torsión que excede la salida máxima del actuador, lo que evita fallas en la interfaz en condiciones de calado o colisión.


Integración del sistema de control
Protocolo de comunicación EtherCAT
El ND-A5215-10 integra electrónica de servoaccionamiento con comunicación de bus de campo EtherCAT, lo que permite tiempos de ciclo de 1 ms para actualizaciones de comandos de posición y 125 μs para cierre de bucle de torsión. Este ancho de banda de comunicación admite algoritmos avanzados de control de movimiento: control de impedancia para limitación de fuerza del robot colaborativo, supresión de vibraciones a través de retroalimentación de aceleración a nivel de articulaciones y mantenimiento predictivo a través de tendencias de parámetros del motor.
Integración de funciones de seguridad
La seguridad funcional según SIL 3/PL e se logra mediante monitoreo de posición redundante (codificadores duales con comparación cruzada), circuitos de desconexión de torque segura (STO) con enclavamientos de hardware y control de freno seguro para ejes cargados por gravedad. iHF Group proporciona documentación de seguridad que incluye análisis FMEDA e informes de pruebas de inyección de fallas para respaldar los procesos de certificación de seguridad funcional y marcado CE del cliente.
Dominios de aplicación
Robótica colaborativa
La envolvente compacta, la baja inercia reflejada y las capacidades de control sensibles a la fuerza del ND-A5215-10 lo hacen adecuado para articulaciones de robots colaborativos donde la interacción humano-robot requiere seguridad intrínseca a través del monitoreo de torsión y posición en lugar de protección externa. La alta capacidad de retroceso del accionamiento armónico permite un movimiento flexible cuando se aplican fuerzas externas, y el sistema de control detecta fuerzas de contacto inferiores a 150 N en el efector final.
Robótica quirúrgica y médica
Las aplicaciones de robots médicos exigen compatibilidad de esterilización, compatibilidad electromagnética para entornos de quirófano y precisión posicional para la manipulación de tejidos. iHF Group ofrece el ND-A5215-10 con acabados superficiales de grado médico, lubricantes biocompatibles y conjuntos de cables blindados que cumplen con los requisitos de compatibilidad electromagnética IEC 60601-1.
Fabricación de semiconductores y electrónica
La compatibilidad con salas blancas (ISO Clase 3), la generación mínima de partículas y el funcionamiento sin vibraciones son esenciales en el manejo de obleas y el ensamblaje de componentes electrónicos. El accionamiento armónico cerrado y el motor sin marco del ND-A5215-10 eliminan los restos de desgaste de las escobillas, mientras que el equilibrio de precisión y la precarga de los rodamientos minimizan la transmisión de vibraciones a equipos de proceso sensibles.
Preguntas frecuentes
P: ¿Cuál es la capacidad máxima de carga útil cuando se utiliza el ND-A5215-10 en una configuración de robot de seis ejes?
R: La capacidad de carga útil depende de la longitud del brazo, los perfiles de aceleración y el ciclo de trabajo, no solo del par del actuador. Para un robot típico de seis ejes con alcance de 800 mm con el ND-A5215-10 en las articulaciones 2, 3 y 4, y actuadores más pequeños en las articulaciones de la muñeca, la carga útil máxima es de aproximadamente 10 a 15 kg con una aceleración de 1 g con un ciclo de trabajo del 50 %. iHF Group proporciona herramientas de simulación cinemática para optimizar la selección de actuadores para geometrías de robots y requisitos de movimiento específicos.
P: ¿Puede el ND-A5215-10 funcionar sin refrigeración líquida en entornos ambientales de hasta 40 °C?
R: La variante enfriada por aire mantiene un par nominal continuo hasta 35 °C ambiente con convección natural y hasta 40 °C con reducción de potencia al 80 % del par nominal. Para un funcionamiento sostenido por encima de 40 °C o en instalaciones confinadas con flujo de aire restringido, se recomienda refrigeración líquida. El servicio de simulación térmica de iHF Group puede predecir el rendimiento para condiciones de instalación específicas.
P: ¿Qué intervalo de mantenimiento se recomienda para el reductor de accionamiento armónico?
R: En condiciones normales de funcionamiento (par nominal, carga de impacto moderada, lubricación adecuada), el flexspline de accionamiento armónico presenta una vida útil superior a las 10 000 horas de funcionamiento. iHF Group recomienda una inspección anual del estado de los rodamientos de salida mediante análisis de vibraciones y el reemplazo del lubricante cada 5000 horas de funcionamiento o 2 años, lo que ocurra primero. Las funciones integradas de monitoreo de condición pueden extender estos intervalos a través de algoritmos de mantenimiento predictivo.
P: ¿El ND-A5215-10 es compatible con servocontroladores de terceros?
R: El ND-A5215-10 está optimizado para la integración con el servoaccionamiento integrado de iHF Group, pero los parámetros del motor (resistencia de fase, inductancia, constante de contraEMF, protocolos de codificador) están documentados para admitir la integración de controladores de terceros. Los clientes deben verificar la compatibilidad del algoritmo de conmutación y el ancho de banda del bucle actual con el equipo de ingeniería de aplicaciones de iHF Group antes de especificar controladores no integrados.
P: ¿Cuál es la especificación de juego y cómo afecta la repetibilidad del robot?
R: El reductor de accionamiento armónico logra un juego cero a través de su geometría de malla elástica. La histéresis medida en el eje de salida suele ser de ±3 segundos de arco en condiciones sin carga. En aplicaciones prácticas de robots, el cumplimiento estructural y la resolución del codificador dominan la repetibilidad en lugar del juego del engranaje, y el ND-A5215-10 contribuye con menos del 5 % del error total de repetibilidad del sistema en cadenas cinemáticas bien diseñadas.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Solicitar cotización
Solicitar cotización