
 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Solicitar cotización
Solicitar cotización 
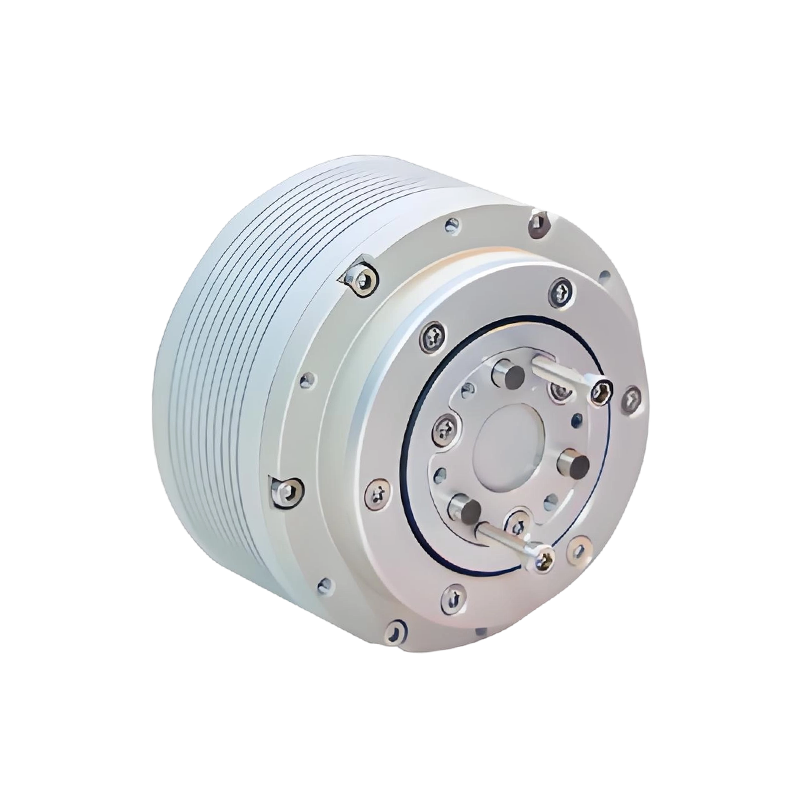
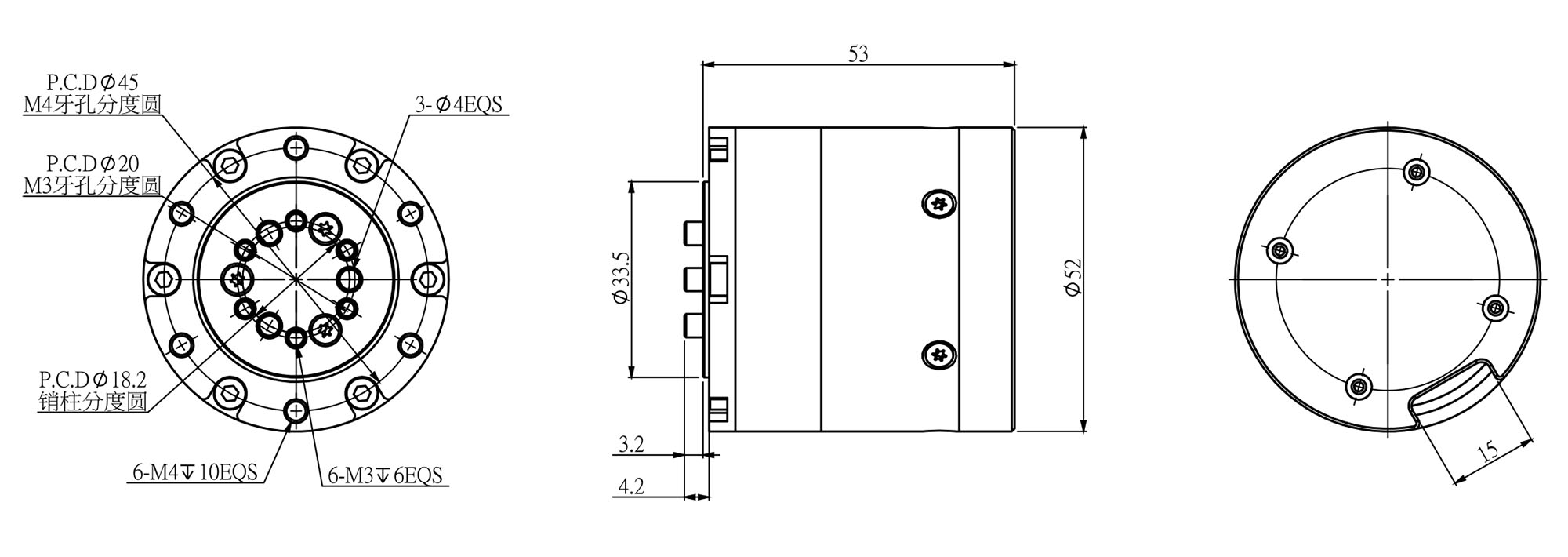
Caja de engranajes del motor de articulación del robot: ND-R9262-07
Enviar consulta ahora
Productfeatures:
· Mantiene un control preciso a bajas velocidades.
· Permite una rápida inversión de dirección del motor
· Logra un control de bucle cerrado de par, velocidad y posición.
· Respuesta rápida, funcionamiento estable, baja vibración y bajo ruido.
· Diseño optimizado de la ranura del motor, alta densidad de par y par dentado optimizado
· Reductor de engranajes planetarios (engranajes helicoidales) de alta precisión, con una redondez de la raíz del diente inferior a 3 minutos de arco
· Admite codificadores duales para mejorar aún más la precisión del control de retroalimentación
· Admite configuración en cadena para múltiples unidades, lo que facilita el suministro de energía y la transmisión de datos










| ND-A4012-25 Joint Actuator | ||
| Model | Unit | Value |
| Ratio | / | 25 |
| Rated Voltage | V | 48 |
| Rated Current | A | 4.5 |
| Rated Power | w | 200 |
| Rated Torque | Nm | 3.5 |
| Peak Torque | Nm | 10 |
| Rated Speed | RPM | 120 |
| Peak Speed | RPM | 150 |
| Overall Efficiency | % | 85 |
| Gearback | Arcmin | <20 |
| Torque Density | Nm/kg | 29.4 |
| Weight | g | 330±10 |
| Dimensions | Mm | Ф52-53 |
| Communication Protocol | / | |
| Baud Rate | / | |
| Encoder | / | |